datos técnicos actuador lineal Manipulación Linipower Jack
Términos y explicaciones
1. Capacidad básica:
La carga máxima que un gato puede soportar o levantar. Sin embargo, dependiendo de la naturaleza de la carga, es necesario seleccionarla y utilizarla con una carga que incluya Factor de servicio (Sf).
2. Diámetro exterior del tornillo/diámetro de la raíz de la rosca:
Véase la figura siguiente.
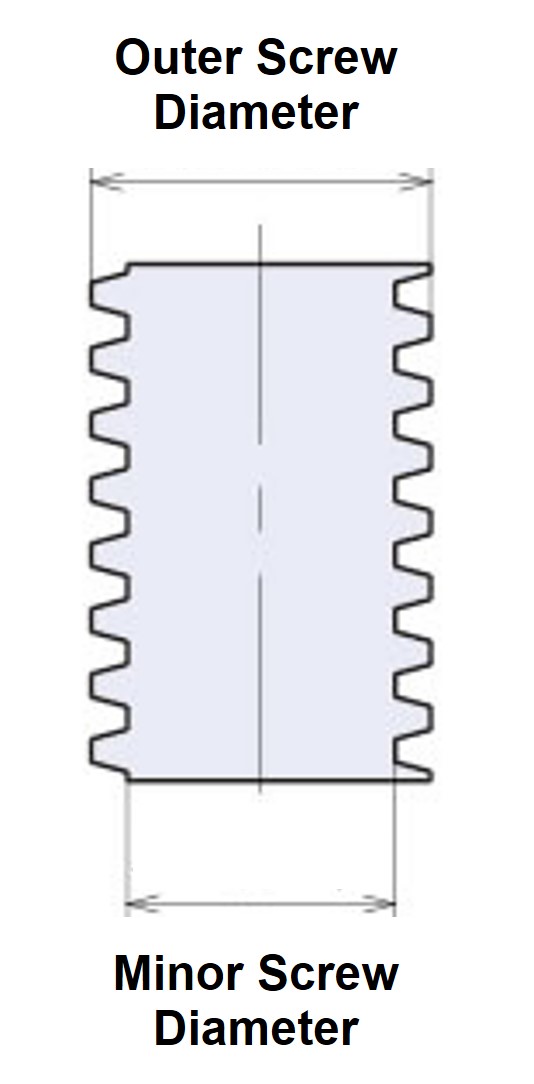
[Hilo trapezoidal]
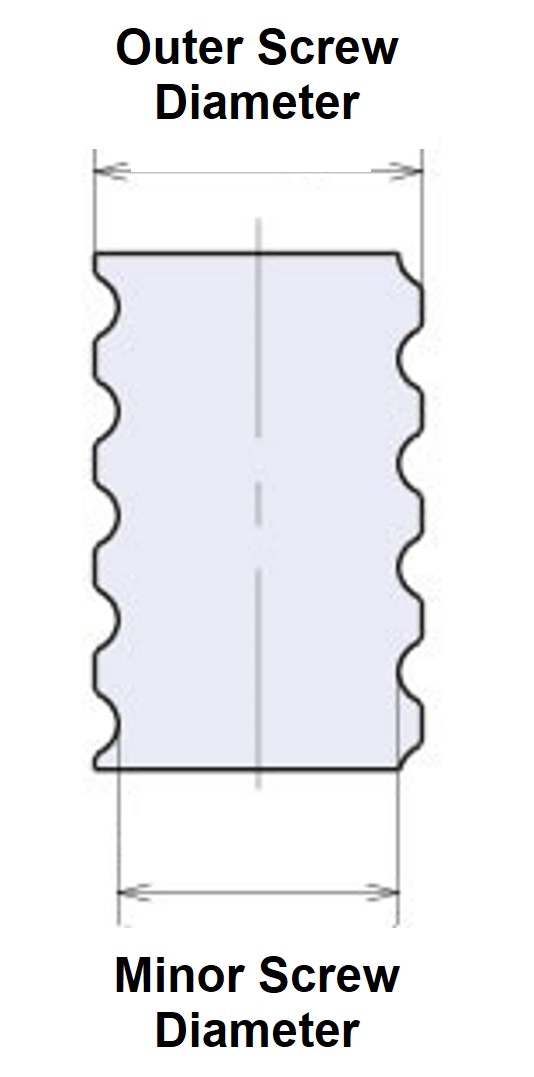
[Husillo de bolas]
3. Cable de rosca:
En un gato hidráulico, esta es la cantidad de movimiento axial del eje del tornillo (o de la tuerca en el caso de una especificación de tuerca móvil) por rotación de la rueda helicoidal.
4. Golpe cerebral:
La distancia que puede moverse el vástago del tornillo (o la tuerca, en el caso de una tuerca móvil).
XMAX-XMIN en el dibujo de dimensiones.
5. Relación de velocidad del tornillo sin fin:
El número de rotaciones del eje de entrada necesarias para hacer girar la rueda helicoidal una vez.
(relación de reducción entre el eje de entrada y la rueda helicoidal)
6. Eficiencia general:
La eficiencia operativa global del gato, incluyendo la eficiencia del tornillo y la eficiencia del tornillo sin fin.
7. Capacitancia de entrada máxima permitida:
La capacidad de entrada admisible que define la relación entre la carga y la velocidad del eje del tornillo (velocidad de rotación de entrada).
Utilizar dentro del rango que no exceda ciclo de trabajo porcentual (%ED) o la temperatura superficial del reductor del gato (MÁX. 80 °C).
8. Par motor en ralentí sin carga:
El par de entrada necesario para hacer girar el eje de entrada sin carga.
9. Par de retención:
El par de entrada necesario para que el eje de entrada soporte la misma carga que la capacidad básica.
10. Par de torsión admisible en el eje de entrada:
Esto se refiere únicamente al par admisible del eje de entrada y está limitado por la resistencia del eje.
Cuando los gatos hidráulicos están conectados en serie, la suma del par requerido para un gato y el par transmitido a los demás gatos está limitada a un valor admisible o inferior.
11. Par de entrada requerido para la capacidad básica:
El par de entrada requerido para el eje de entrada al levantar o bajar la misma carga que la capacidad básica.
12. Recorrido del tornillo por rotación del eje de entrada:
La cantidad de movimiento del eje del tornillo (o de la tuerca en el caso de especificaciones de tuerca móvil) por rotación del eje de entrada.
13. Velocidad máxima de rotación de entrada a capacidad básica:
La velocidad de rotación máxima que se puede introducir en el eje de entrada al levantar una carga igual a la capacidad básica.
14. Par de torsión de rotación del eje del tornillo a capacidad básica:
El par de torsión que hace girar el eje del tornillo (o la tuerca en el caso de especificaciones de tuerca móvil) al levantar o bajar una carga igual a la capacidad básica.
A menos que se tomen medidas antirrotación en el lado del dispositivo o en el lado del conector, el tornillo y la tuerca girarán juntos y no se moverán hacia arriba ni hacia abajo.
15. carga admisible:
La carga se puede calcular en función de la capacidad de entrada máxima admisible una vez que se haya determinado la velocidad del eje del tornillo del gato (velocidad de rotación de entrada).
16. Pandeo:
El vástago helicoidal de un gato es largo en comparación con su sección transversal, por lo que cuando la fuerza de compresión en la dirección axial del tornillo supera cierto valor, el vástago pierde estabilidad y sufre una deformación por flexión repentina y considerable. Esto se denomina pandeo.
La carga crítica de pandeo varía según el método de soporte (condiciones de instalación).
17. Velocidad de rotación admisible del eje del tornillo:
El eje del tornillo gira bajo la acción de su propio peso, y cuando la velocidad de rotación se aproxima a la frecuencia natural del eje, se produce resonancia y vibración. Por lo tanto, debe utilizarse a una velocidad de rotación inferior a la del punto de resonancia (velocidad de rotación crítica).
El punto de resonancia se denomina velocidad de rotación admisible del eje del tornillo. En el caso de los gatos hidráulicos, deben tenerse en cuenta las especificaciones de la tuerca móvil, que hace girar el eje del tornillo.
18. Distancia de planeo:
La distancia hasta que se activa el interruptor de límite o el botón de parada y la máquina se detiene.
Esta distancia de inercia varía según las condiciones de carga, las características de los frenos y el circuito de funcionamiento.
19. Precisión de frenado:
La magnitud de la variación en la posición de parada al arrancar y detenerse repetidamente.
20. Autobloqueante:
Esto significa que el gato por sí solo, sin dispositivo de freno, puede soportar una carga.
Todos los números de marco JWM (tipo de tornillo trapezoidal) del 002 al 1000 son autoblocantes en los cálculos.
21.Velocidad ciclo de trabajo porcentual:
ciclo de trabajo porcentual (también llamada %ED) es el porcentaje de tiempo de funcionamiento en un ciclo.
ciclo de trabajo porcentual (%ED) = Tiempo de operación por ciclo / (Tiempo de operación por ciclo + Tiempo de inactividad) x 100 (%)
22. Empuje generado:
Empuje (carga máxima de elevación) calculado a partir del par nominal del motor para un gato de motor o Motorreductor únicamente.
Sin embargo, es necesario realizar una selección cuando se opera un gato con una unidad de accionamiento junto con otros gatos.
23. Vida útil del husillo de bolas:
La vida útil de un husillo de bolas está determinada por el descascarillado causado por la fatiga en la superficie de rodadura de las bolas, y se expresa como la distancia de recorrido por el eje del husillo (tuerca) hasta que se produce el descascarillado.
Este fenómeno de desprendimiento debido a la fatiga variará en cierta medida incluso cuando muchos componentes idénticos funcionen bajo las mismas condiciones.
La vida útil que se puede alcanzar sin causar descamación en el 90% o más del total se denomina vida útil nominal (vida útil B10).
