datos técnicos actuador lineal Selección actuador de cadena Zip
Tabla de selección
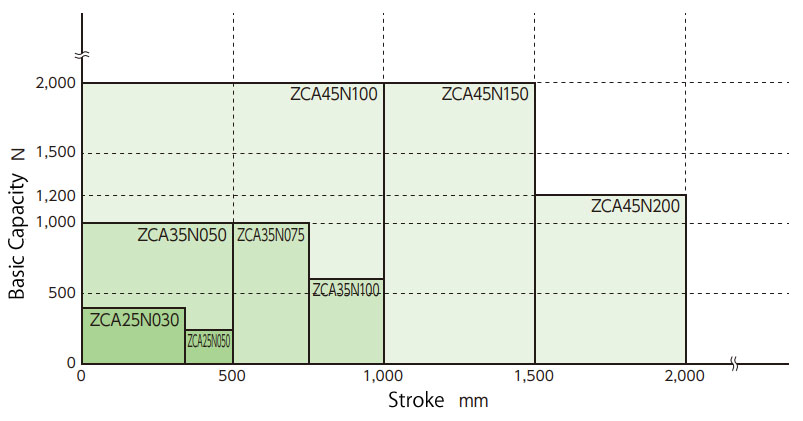
El gráfico de la derecha muestra la relación entre el volumen sistólico y la capacidad basal.
Verifique el empuje y la carrera requeridos por unidad ZCA utilizando este gráfico para determinar el número de modelo.
Si se requiere un análisis detallado, consulte el cálculo a continuación.
Método de selección
Maquinaria utilizada... Configuración de la máquina, número de unidades ZCA utilizadas, entorno operativo, etc.
Carga..... Características de la carga, masa de la carga o pieza de trabajo, fuente de accionamiento, método de accionamiento, etc.
Forma de montaje: Dirección de montaje (ascendente, horizontal, colgante), tipo de guía lineal
Velocidad de funcionamiento..... Velocidad requerida por ZCA
Trazos...Los trazos que realmente usarás
1. Cálculo de la carga de corrección Fs
Considerando la naturaleza de la carga, calcule la carga corregida Fs consultando Factor de servicio (Tabla 1).
Carga corregida Fs N{kgf} = Empuje requerido PN{kgf} × Factor de servicio Sf
Tabla 1 Factor de servicio
| Cargar la naturaleza | Ejemplo de uso | Factor de servicio Sf |
|---|---|---|
| Funcionamiento suave y sin sobresaltos pequeña inercia de carga |
Cambio de cinta transportadora | 1.0~1.3 |
| Funcionamiento con impacto leve medio de inercia de carga |
Diversos dispositivos de transferencia Varios elevadores |
1.3~1.5 |
2. Cálculo del empuje requerido Fs1 por unidad
El empuje requerido Fs1 por unidad se calcula a partir de la carga corregida Fs.
En el caso de operación vinculada, consulte factor múltiple (Tabla 2) para el cálculo.
Empuje por unidad ZCA Fs1 N{kgf} = Carga corregida Fs N{kgf} ÷ (Número de unidades enlazadas × factor múltiple Fg)
Tabla 2: factor múltiple
| Número de unidades enlazadas (unidades) | 1 unidad | 2 unidades | 4 unidades |
|---|---|---|---|
| factor múltiple Fg | 1.0 | 0.83 | 0.69 |
3. Elija entre sin unidad de accionamiento, motor hipoide o TERVO.
4. Seleccione un número de modelo
De la lista de modelos, confirme que el empuje Fs1 por unidad sea igual o inferior a la capacidad básica del ZCA. Deje un margen para la carrera a utilizar.
[Si no se selecciona ninguna unidad de accionamiento]
De la lista de modelos, seleccione provisionalmente un número de modelo en función del empuje y la carrera admisible por unidad. Continúe con el paso 5 en adelante.
[Si selecciona motor hipoide o TERVO]
De la lista de modelos, seleccione provisionalmente un número de modelo que satisfaga el empuje por unidad, la velocidad de funcionamiento de la cadena y la carrera permitida.
Continúe a partir de la sección 9. Para consultar la lista de modelos, consulte la lista de modelos con motor hipoide (aquí) y la lista de modelos con TERVO (aquí).
5. Velocidad máxima
Asegúrese de estar por debajo de la velocidad máxima.
6. Compruebe la velocidad de rotación de entrada requerida.
La velocidad de rotación de entrada requerida se calcula a partir de la velocidad de funcionamiento.
N = V×60/K N: Velocidad de rotación de entrada r/min V: Velocidad de operación mm/s K: Distancia de movimiento Zip Chain mm por rotación del eje de entrada (Tabla 3)
7. Compruebe el par de entrada requerido
Calcule el par de entrada requerido.
T = Fs1×Dp 2×1000×η + To
T: Par de entrada requerido N·m{kgf·m}
Fs 1: Empuje requerido por unidad N{kgf}
D p: Diámetro primitivo de la rueda dentada en mm (Tabla 3)
η: Eficiencia global de ZCA (Tabla 3)
Para: Par de funcionamiento medio en vacío N·m{kgf·m} (Tabla 3)
Tabla 3 Tabla de habilidades
| Modelo | ZCA25 | ZCA35 | ZCA45 |
|---|---|---|---|
| Eficiencia global η | 90% | 90% | 90% |
| *Par de funcionamiento medio en vacío a N·m{kgf·m} | 0.62{0.063} | 1.63{0.17} | 5.85{0.6} |
| Recorrido del eje de entrada por revolución (K mm) | 95.3 | 142.9 | 240 |
| Diámetro primitivo de la rueda dentada Dp mm | Φ30.92 | Φ46.48 | Φ78.0 |
*Este es el par promedio necesario para hacer girar continuamente el eje de entrada sin carga.
Existe una fluctuación de par debido al engranaje en cada paso de la cadena.
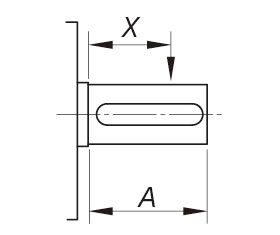
8. Consideración de la carga admisible en voladizo
Cuando el eje sea accionado por una cadena, engranaje, correa dentada, correa trapezoidal, etc., verifique que la carga en voladizo se encuentre dentro del valor admisible.
OHL: Carga en voladizo N{kgf}
f: Coeficiente del elemento de transmisión (Tabla 4)
Lf: Coeficiente que depende de la posición de aplicación de la carga (Tabla 5)
T: Par de entrada requerido N·m{kgf·m}
D: Diámetro de la circunferencia primitiva de la rueda dentada, engranaje, polea, etc. (m)
OHL admisible ≧ 2×T×f×Lf D
Tabla 4 Coeficientes de elementos de transmisión (f)
| Cadena | Correa dentada dentada | correa trapezoidal |
|---|---|---|
| 1.0 | 1.25 | 1.5 |
Tabla 5. Coeficiente de carga (Lf) en función de la posición de aplicación de la carga
| X/A | 0.25 | 0.5 | 0.75 | 1.0 |
|---|---|---|---|---|
| Lf | 0.9 | 1.0 | 1.15 | 1.25 |
Tabla 6. Carga admisible en voladizo
| Modelo | ZCA25 | ZCA35 | ZCA45 |
|---|---|---|---|
| Carga admisible en voladizo N{kgf} | 638{65.0} | 946{96.4} | 2065{210.5} |
9. Seleccionar opciones
Seleccione la opción que mejor se ajuste a sus condiciones de uso.
- • Base de montaje
- ·tapa
- ·Acordeón
- • Placa de engrase
10. Decidir el número de modelo
11. Cálculo de la capacidad de entrada requerida (sin motor)
Capacidad de entrada requerida P kW = T×N/9550
Nota:
Si el par de funcionamiento promedio en vacío representa el 25 % o más del par de entrada requerido, las fluctuaciones de par causadas por el engranaje particular de la cadena tendrán un efecto significativo. Para garantizar un funcionamiento suave, seleccione un par que sea 1,5 veces el par de funcionamiento promedio en vacío (Tabla 3).
Precauciones al seleccionar el par de entrada requerido
Si el ZCA está dispuesto en línea recta como se muestra en el diagrama a continuación, asegúrese de que el par de entrada de la fuente de accionamiento sea inferior al par de entrada admisible del eje.

El par de entrada requerido para dos unidades se transmite al eje de entrada del ZCA (1) en el lado de la fuente de accionamiento.
Asegúrese de que el par de torsión de estas dos unidades sea inferior al par de torsión admisible del eje de entrada.
Par de entrada requerido T1 solo para ZCA (1).
Par de entrada requerido T2 solo para ZCA (2).
Par requerido de la fuente de accionamiento TM = T1 + T2 < Par admisible del eje de entrada
Ejemplo de selección
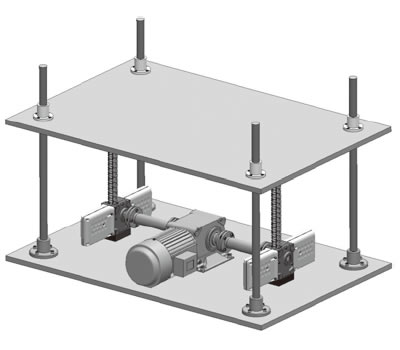
Maquinaria utilizada: Dos dispositivos de elevación ZCA, utilizados en el interior de la fábrica (temperatura normal, sin polvo).
Empuje requerido: Impacto ligero, 1200 N (122 kgf) / 2 unidades. Se instala por separado un pequeño motorreductor con freno, conectado mediante un acoplamiento.
Tipo de montaje: 4 postes guía (utilizados para elevación)
Velocidad de funcionamiento: 250 mm/s (velocidad constante: sin aceleración ni desaceleración)
Carrera.....450 mm
Fuente de alimentación....200V/60Hz
| Unidades del SI |
|---|
ZCA
Motor (60 Hz)
Acoplamiento
|
| {unidad de gravedad} |
|---|
ZCA
Motor (60 Hz)
Acoplamiento
|
Si se requiere control de posición, utilice un motor con codificador o un servomotor.
(Si necesita un motor con codificador, póngase en contacto con nosotros por separado).
Este ejemplo de selección es solo un ejemplo, por lo que consulte el catálogo dedicado al momento de seleccionar acoplamientos, Caja de cambios de inglete y motores.
unidad de accionamiento
Serie TA/TR motor hipoide
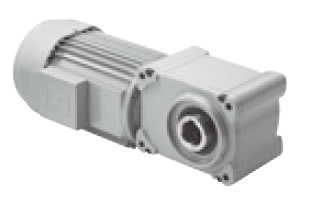
- -Se trata de un motorreductor compacto de tamaño reducido que utiliza un engranaje hipoide de alta eficiencia y tiene una altura reducida.
- - Fácil de usar gracias a sus exclusivas medidas de prevención de fugas de grasa, y cuando se utiliza junto con un modelo equipado con codificador, el control de posicionamiento multipunto también resulta sencillo.
Caja de engranajes cónicos
- ・ Caja de cambios de inglete se utilizan cuando varios actuador de cadena Zip funcionan sincronizadamente.
- -Ofrecemos una amplia variedad de modelos estándar en cuanto a tamaño, disposición del eje, relación de velocidad, material, etc.
Acoplamiento ECHT-FLEX

- - Un acoplamiento de alta precisión y sin lubricación, ideal también para accionar servomotores.
- ・Admite una amplia gama de métodos de fijación de ejes, incluidos los de chavetero, abrazadera y bloqueo cónico, así como el mecanizado preciso de agujeros de ejes en incrementos de 1 mm.
