- El rendimiento del robot no se puede maximizar.
(Carga/velocidad MÁXIMA)
|
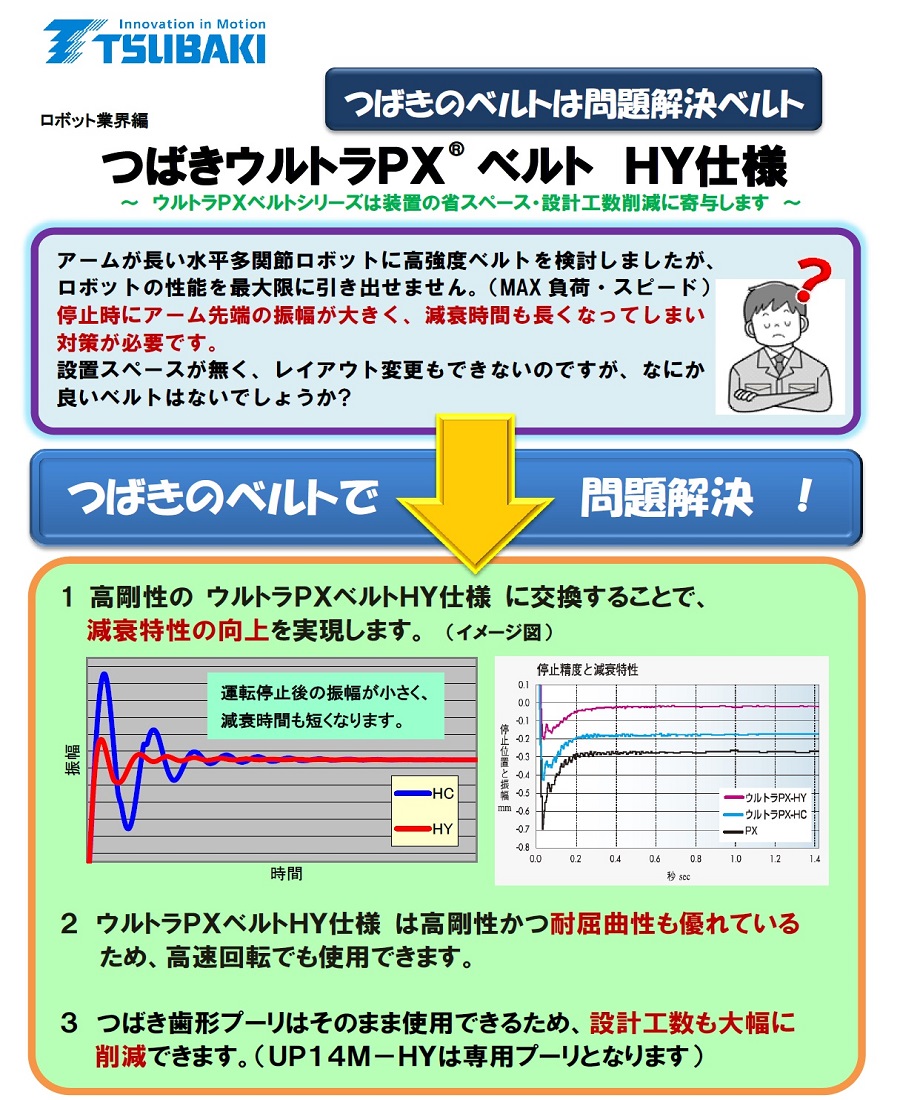
- -Una alta rigidez mejora las características de amortiguación
|
- Mejora de la precisión de parada del brazo robótico
|
- Cuando se detiene, la amplitud de la punta del brazo es grande.
Largo tiempo de decaimiento
|
- -Excelente resistencia a la flexión, puede utilizarse incluso a altas velocidades
|
- Posibilidad de ahorrar espacio y de alta velocidad
|
- No hay espacio para la instalación.
No puedes cambiar el diseño
|
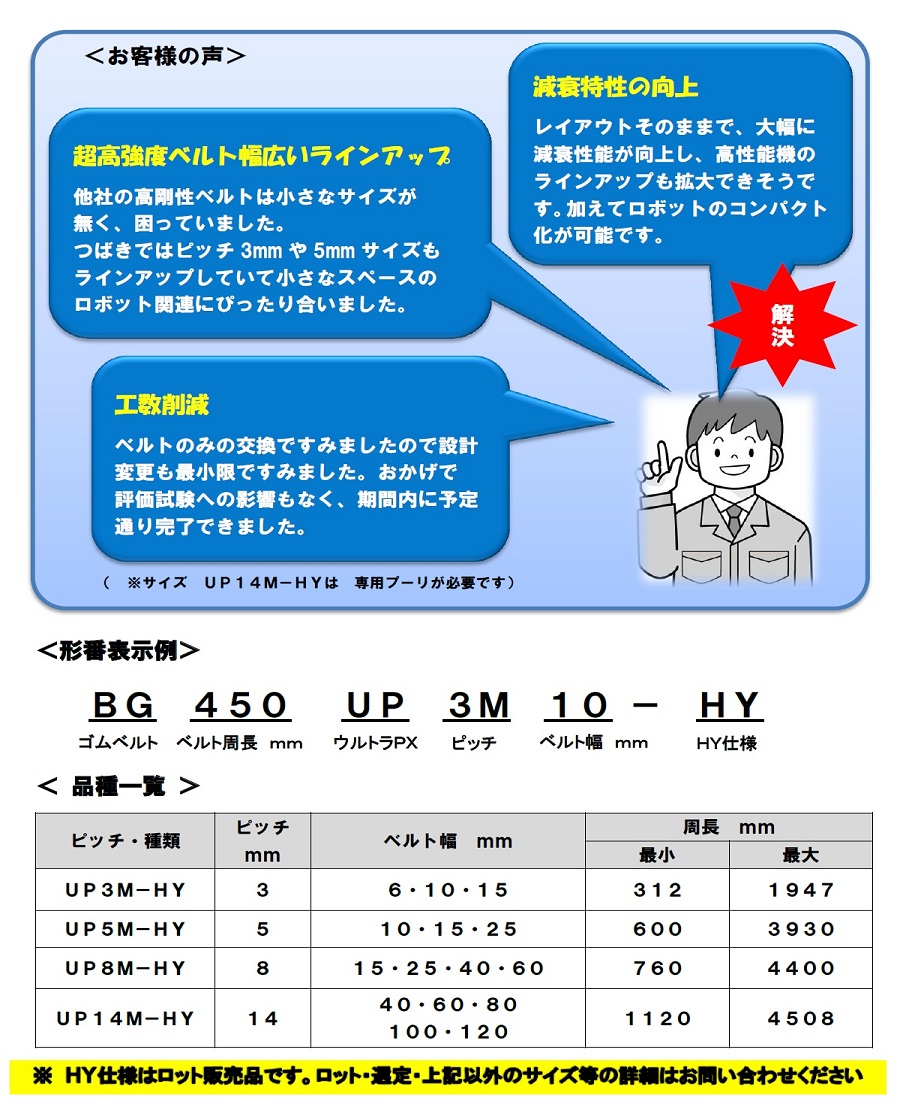
- ・Se pueden utilizar las poleas actuales
(El modelo UP14M-HY requiere una polea especial)
|
- Solo reemplazo de la correa
Una gama de tamaños que no están disponibles en otras empresas.
|