datos técnicos Cadena de transmisión Selección de cadenas
Fórmula de cálculo necesaria para la selección
Símbolos y unidades utilizados en las fórmulas
| símbolo | Explicación | Unidades del SI | {unidad de gravedad} |
|---|---|---|---|
| αb | desaceleración de la carga | m/s2 | m/s2 |
| αs | Aceleración de carga | m/s2 | m/s2 |
| C | Distancia entre ejes expresada en número de eslabones | - | - |
| C′ | longitud del transportador | m | m |
| d | Diámetro primitivo de la rueda dentada del eje de salida del reductor | mm | mm |
| d1 | Diámetro primitivo del piñón pequeño | mm | mm |
| d2 | Diámetro de paso de piñón grande | mm | mm |
| D | diámetro exterior del tambor | mm | mm |
| Fb | Tensión de la cadena durante la desaceleración | kN | kgf |
| F'b | Tensión correctiva de la cadena durante la desaceleración | kN | kgf |
| FC | Tensión de la cadena del accionamiento del carro | kN | kgf |
| F'C | Tensión de la cadena de compensación para accionamientos de carros | kN | kgf |
| Fℓ | Tensión de la cadena debido al par de torsión (carga real) | kN | kgf |
| F'ℓ | Par de torsión de la cadena corregido debido a la carga (carga real). | kN | kgf |
| Fm | Tensión de la cadena según la potencia nominal del motor (kW) | kN | kgf |
| F'm | Compensación de la tensión de la cadena desde el lado del motor principal | kN | kgf |
| Fms | Tensión de la cadena debido al par de arranque del motor | kN | kgf |
| F'ms | Corrección de la tensión de la cadena mediante el par de arranque del motor primario | kN | kgf |
| Fmb | Tensión de la cadena debido al par de frenado del motor | kN | kgf |
| F'mb | Corrección de la tensión de la cadena mediante el par de frenado del motor | kN | kgf |
| FS | Tensión de la cadena durante la aceleración | kN | kgf |
| F'S | Tensión correctiva de la cadena durante la aceleración | kN | kgf |
| FW | Tensión de la cadena debido a la carga (carga real) | kN | kgf |
| F'W | Tensión de la cadena corregida a partir de la carga (carga real) | kN | kgf |
| f1 | Coeficiente de fricción entre rodillo y riel (con lubricación 0,14, sin lubricación 0,21) | - | - |
| G | Aceleración gravitacional estándar G = 9,80665 m/s 2 | - | - |
| i | Por ejemplo, si la relación de velocidad es 1/30, entonces i = 30. | - | - |
| Iℓ{GD2ℓ} | Momento de inercia de la carga convertido al eje del motor | kg・m2 | kgf・m2 |
| Im{GD2m} | Momento de inercia del eje del motor primario | kg・m2 | kgf・m2 |
| K | Factor de impacto | - | - |
| Kn | factor de rotación | - | - |
| Ks | Factor de servicio | - | - |
| Ku | Factor de carga desequilibrado | - | - |
| Kv | coeficiente de velocidad del engranaje de pasador | - | - |
| Kz | coeficiente del número de dientes | - | - |
| L | Longitud de la cadena (número de eslabones) | - | - |
| m | masa de la unidad de cadena {peso} | kg/m | kgf/m |
| M{W} | Cargar masa {peso} | kg | kgf |
| n | Velocidad de rotación del piñón pequeño al calcular la velocidad de la cadena | r/min | rpm |
| n1 | velocidad de rotación del eje del motor | r/min | rpm |
| n2 | Velocidad de rotación del eje de carga (velocidad de rotación del eje accionado) | r/min | rpm |
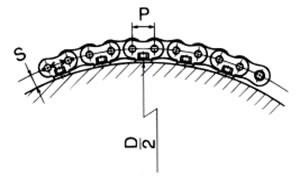
| P | paso de cadena | mm | mm |
| R | relación de inercia | - | - |
| S | Altura de fijación de la cadena de fijación RS (distancia desde la superficie de montaje del tambor hasta el centro de paso de la cadena) | mm | mm |
| tb | Tiempo de desaceleración | s | s |
| tS | Tiempo de aceleración | s | s |
| Tb | Par de frenado del motor principal | %(kN・m) | %(kgf・m) |
| Tmax | Par máximo (de bloqueo) del motor primario | %(kN・m) | %(kgf・m) |
| TS | Par de arranque del motor primario | %(kN・m) | %(kgf・m) |
| Tℓ | Par de carga | kN・m | kgf・m |
| Tm | Par de torsión actuante | kN・m | kgf・m |
| Tn | Par nominal del motor principal | kN・m | kgf・m |
| V | Velocidad de la cadena | m/min | m/min |
| Vℓ | Velocidad de carga | m/min | m/min |
| Z | Número de dientes en el piñón grande | - | - |
| Z′ | Número de dientes en el piñón pequeño | - | - |
| ω | Velocidad angular del eje del motor primario | rad/min | rad/min |
| ωb | Desaceleración angular del eje del motor primario | rad/s2 | rad/s2 |
| ωS | Aceleración angular del eje del motor primario | rad/s2 | rad/s2 |
fórmula de cálculo
- 1. Todas las selecciones se realizan asumiendo una eficiencia de transmisión que incluye la cadena de η = 1.
- 2. Para la tensión y la transmisión de potencia kW utilizadas en la selección, utilice los valores calculados en los puntos 13 y 14 de la tabla.
| artículo | Unidades del SI | {unidad de gravedad} |
|---|---|---|
|
1. Longitud de la cadena (número de eslabones): L |
Al utilizar una transmisión de bobinado de dos ejes
|
|
|
Transmisión por engranaje de pasador |
Al utilizar una cadena con un accesorio enrollado alrededor del exterior del tambor L = 180° tan-1 P D + 2S
|
|
|
2. Velocidad de la cadena: V |
V = P × Z' × n 1000 (m/min) |
|
|
3. Tensión de la cadena a la potencia nominal del motor (kW) y a la velocidad de rotación nominal: Fm |
Fm = 60 × kW V (kN) |
Fm = 6120 × kW V (kgf) |
|
4. Momento de inercia de la carga I(GD) 2)de |
Iℓ = M × V 2πn1 2 (kg・m2) |
GD2ℓ = W × V πn1 2 (kgf・m2) |
|
5. Par nominal del motor principal: Tn |
Tn = 9.55 × kW n1 (kN・m) |
Tn = 974 × kW n1 (kgf・m) |
|
6. Par de trabajo: Tm |
Tm =
Ts(%) + T max (%)
2 × 100
× Tn (kN・m) |
Tm =
Ts(%) + T max (%)
2 × 100
× Tn (kgf・m) |
|
7. Tensión de la cadena debido al par de arranque: Fms |
Fms =
Ts(%) × i
{d/(2 × 1000)} × 100
× Tn × 1(kN) |
Fms =
Ts(%) × i
{d/(2 × 1000)} × 100
× Tn × 1(kgf) |
|
Tensión de la cadena debido al par de frenado: Fms |
Fmb =
T b (%) × i
{d/(2 × 1000)} × 100
× Tn × 1.2*(kN) * es una constante |
Fmb =
T b (%) × i
{d/(2 × 1000)} × 100
× Tn × 1.2*(kgf) * es una constante |
8. Tiempo de aceleración: ts |
ts = (Im + Iℓ) × n1 9550 × (Tm - Tℓ) (s) |
ts = (GD2m + GD2ℓ) × n1 375 × (Tm - Tℓ) (s) |
9. Tiempo de desaceleración: t b ±: Para cargas negativas como cargas colgantes |
tb = (Im + Iℓ) × n1 9550 × (Tb ± Tℓ) (s) |
tb = (GD2m + GD2ℓ) × n1 375 × (Tb ± Tℓ) (s) |
10. Aceleración
Se asume una aceleración en línea recta. De lo contrario, calcule con la aceleración máxima. |
Movimiento lineal (aceleración de la carga) αs = V ℓ ts × 60 Movimiento de rotación (velocidad angular del eje del motor primario) ω = 2 π × n1 Movimiento de rotación (aceleración angular del eje del motor primario) ωs = ωts × 60 |
|
11. Desaceleración
Se asume una aceleración en línea recta. De lo contrario, calcule en la desaceleración máxima. |
Movimiento lineal (desaceleración de la carga) αb = V ℓ tb × 60 Movimiento de rotación (velocidad angular del eje del motor primario) ω = 2 π × n1 Movimiento de rotación (desaceleración angular del eje del motor primario) ωb = ωtb × 60 |
|
12. Tensión de la cadena durante la aceleración: Fs |
Movimiento lineal Fs = M × αs 1000 + Fw Movimiento de rotación Fs = I ℓ × ωs × i 1000 × d 2 × 1000 + Fw |
Movimiento lineal Fs = M × αs G + Fw Movimiento de rotación Fs = GD 2ℓ /4 × ωs × i d 2 × 1000 × G + Fw |
Tensión de la cadena durante la desaceleración: Fb |
Movimiento lineal Fb = M × αb 1000 + Fw Movimiento de rotación Fb = I ℓ × ωb × i 1000 × d 2 × 1000 + Fw |
Movimiento lineal Fb = M × αb G + Fw Movimiento de rotación Fb = GD 2ℓ /4 × ωb × i d 2 × 1000 × G + Fw |
13. Corrección kW (para selección general) |
kW de corrección = Potencia nominal del motor primario (kW) × Ks (kW) | |
14. Tensión de la cadena de compensación |
||
Tensión de la cadena de corrección del motor primario: F'm |
F'm = Fm × Ks × Kn × Kz (kN) {kgf} | |
Tensión de la cadena corregida a partir del par de arranque: F ms |
F'ms = Fms × K × Kn × Kz (kN) {kgf} | |
Tensión de la cadena de corrección por par de bloqueo: F'mb |
F'mb = Fmb × K × Kn × Kz (kN) {kgf} | |
Tensión de la cadena de compensación del accionamiento del carro: F'c |
F'c = Fc × Ks × Kn × Kz (kN) {kgf} | |
Tensión de la cadena corregida durante la aceleración: F |
F's = Fs × Kn × Kz (kN) {kgf} | |
Tensión de la cadena corregida durante la desaceleración: F'b |
F'b = Fb × Kn × Kz (kN) {kgf} | |
Tensión de cadena corregida por carga: F'w |
F'w = M × Ks × Kn × Kz × G 1000 (kN) |
F′w = W (o Fw) × Ks × Kn × Kz (kgf) |
|
Si se desconoce la masa M {peso W}, calcule el par de torsión del eje T = Tn × i (kN・m) {kgf・m} a partir del par de torsión nominal Tn del motor primario. |
||
15. Relación de inercia: R |
R = Iℓ Im |
R = GD2ℓ GD2m |
16. Conversión del momento de inercia (I) y efecto volante (GD 2) |
1kg・m2...(I) | 4kgf・m2...(GD2) |
Las tensiones de cadena en las fórmulas anteriores son todas para su uso con una sola cadena.
Cuando se utilicen dos o más cadenas, calcule la tensión por cadena multiplicándola por el coeficiente de carga desequilibrada Ku (Tabla 4).
Factor de carga desequilibrado Ku
Al utilizar dos o cuatro cadenas para levantar o conducir un carro, la tensión que actúa sobre las cadenas no será uniforme.
Esto se utiliza como guía para el desequilibrio izquierda-derecha al calcular la tensión que actúa sobre cada cadena multiplicándola por el coeficiente de carga de desequilibrio Ku a continuación.
(Ejemplo) Coeficiente de carga desequilibrada por unidad en una suspensión de cuatro hilos
Ku = 0.6 × 0.6 = 0.36
| 2 botellas | 0.6 |
|---|---|
| 4 piezas | 0.36 |
