datos técnicos del motorreductor pequeño Especificaciones del motor
Al accionar un motor estándar de forma continua con un inversor
1. Rango de frecuencia
- ・Máx. 120 Hz. En el rango de baja frecuencia (Hz), utilice dentro del rango de tolerancia del inversor.
- Los modelos de 40 W, 60 W y 90 W no se pueden utilizar a bajas frecuencias ni para un funcionamiento continuo superior a 60 Hz. Por favor, consúltenos por separado.
- Los modelos de 0,75 kW a 5,5 kW con motor estándar japonés son motores estándar que pueden funcionar a un par constante de 6 Hz a 60 Hz. Para obtener más información, consulte la sección sobre el accionamiento continuo por inversor de motor estándar japonés a continuación.
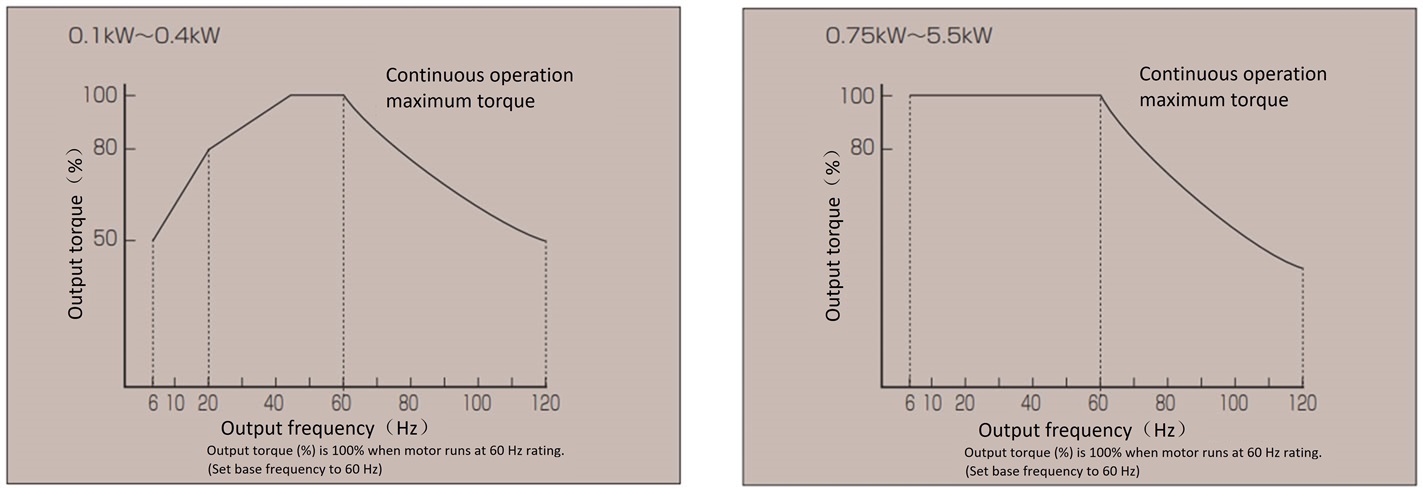
2. Características de par
Consulte el diagrama siguiente para conocer las características de frecuencia y par.
- A altas velocidades, el par disminuye en proporción inversa a la velocidad de rotación debido a que la potencia (kW) permanece constante. Además, a medida que aumenta la velocidad de rotación, también aumentan el ruido del motor, el ruido del ventilador, el ruido del reductor, las vibraciones, etc.
- A bajas velocidades, la eficiencia operativa y el efecto de refrigeración del motor disminuyen, lo que provoca un gran aumento de temperatura. Utilice el motor con un par motor menor, como se muestra en el diagrama a continuación.
3. Con freno
- El freno requiere una fuente de alimentación específica (frecuencia, voltaje), por lo que su circuito debe funcionar por separado. Los productos estándar se envían con los cables del freno atornillados a los del motor, pero retire los tornillos y conéctelos aparte.
- Al frenar, mantenga la velocidad por debajo de 60 Hz (1800 r/min). Frenar a velocidades superiores a 60 Hz puede causar daños mecánicos, desgaste anormal y generación de calor en el revestimiento, entre otros problemas. Por lo tanto, opere siempre a 60 Hz o menos.
4. Motores monofásicos y motores antiexplosivos
- Los motores monofásicos no pueden ser accionados por inversores porque estos utilizan condensadores.
Además, no se pueden utilizar motores antiexplosivos porque están fuera del rango de la fuente de alimentación (frecuencia y voltaje) para la cual se ha solicitado la certificación antiexplosivos.
5. Precauciones
A bajas frecuencias y por encima de 60 Hz, reduzca el par como se muestra en el diagrama anterior.
- Cuando un motor de 400 V es accionado por un inversor, puede producirse una falla en el aislamiento debido a las sobretensiones (microsobretensiones) generadas por la conmutación del inversor. Por lo tanto, se requieren medidas preventivas (contramedidas contra microsobretensiones) en el motor, y los motores estándar de 400 V incorporan dichas medidas, incluso si no se indica lo contrario. Sin embargo, si el nivel supera los 1250 V, instale un filtro o reactor de supresión en el lado del inversor.
- - El aumento de temperatura, el ruido y las vibraciones serán mayores que cuando se utiliza energía comercial.
- Para proteger el motor del sobrecalentamiento, configure el controlador térmico electrónico con las características de un motor de uso general o instale un relé térmico entre el inversor y el motor.
- Cuando se utiliza una frecuencia base de 50 Hz, el par de salida debe ser 0,8 veces el valor de la tabla anterior (solo de 0,1 kW a 0,4 kW).
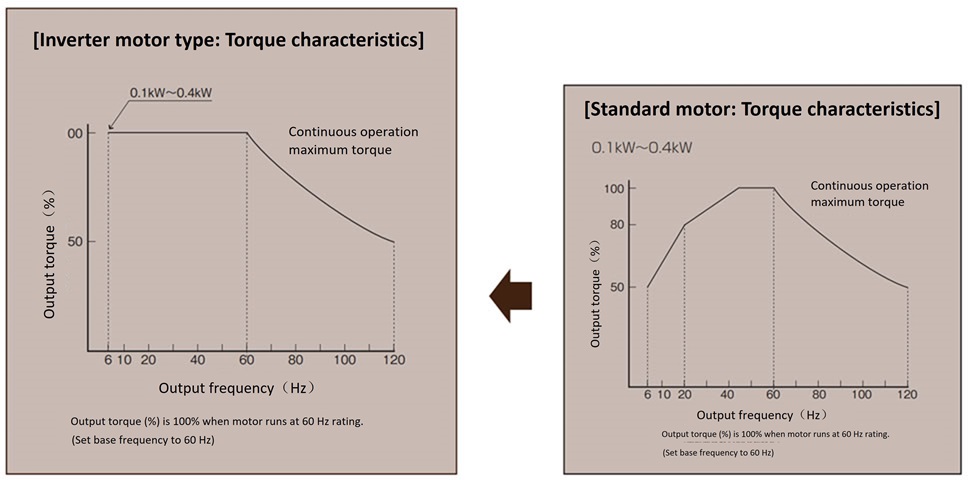
*Con motor inversor
Se ofrece como opción un motor inversor para los modelos de 0,1 kW a 0,4 kW.
Con motor inversor [Código de opción: Z, ZV]
Se trata de un motor que solo funciona con inversor y que puede operar a un par constante en el rango de 6 a 60 Hz cuando es accionado por un inversor.
Capacidad compatible: motor estándar de 0,1 kW a 0,4 kW
| Serie | Voltaje | símbolo | Capacidad del motor | ||
|---|---|---|---|---|---|
| 0.1kW | 0.2kW | 0.4kW | |||
| Motorreductor motor hipoide Motor Croise |
Clase 200 V | Z | ○ | ○ | ○ |
| Clase 400 V | ZV | ○ | ○ | ○ | |
Nota) Tensión nominal [0,1 kW a 0,4 kW: clase 200 V = 200/220 V 60 Hz, clase 400 V = 400/440 V 60 Hz]
*Notas para motores inversores
- - Entre 60 y 120 Hz, el rango característico es de potencia constante, al igual que un motor estándar, y el par de salida es limitado, por lo que se debe tener cuidado con el par de carga.
- Al configurar la tensión de entrada del inversor al motor, ajuste la frecuencia y la tensión base del inversor, y asegúrese de que la tensión de salida coincida con la tensión y la frecuencia indicadas en la placa de características. (Para motores con inversor, la frecuencia base debe ser de 60 Hz). Evite conectar directamente un motor con inversor sin este, ya que las fluctuaciones de tensión provocarán un aumento considerable de la corriente. (Esto no se aplica a operaciones de corta duración, como pruebas o emergencias). Este fenómeno es especialmente notable a 50 Hz.
- - La frecuencia base del inversor debe ser de 60 Hz.
- Si se requiere el 100 % del par a baja frecuencia, utilice un variador de frecuencia para aplicar un aumento de par según sea necesario. Evite periodos prolongados de funcionamiento continuo con un aumento de par excesivo, ya que esto puede provocar sobrecalentamiento.
- El motor puede entrar en resonancia dependiendo de la velocidad y la frecuencia de rotación. Para un funcionamiento continuo, ajuste la frecuencia portadora del inversor para evitar la resonancia.
- Cuando la carga es ligera, como durante una prueba, el valor de la corriente puede ser elevado a bajas frecuencias. Esto se debe a las características del motor y no es anormal. El valor de la corriente se puede reducir modificando la configuración del inversor (reduciendo el aumento de par, disminuyendo la relación V/F o el control vectorial de par).
- Para proteger el motor del sobrecalentamiento, ajuste el controlador térmico electrónico a las características del motor del inversor o instale un relé térmico entre el inversor y el motor.
- Si el freno está instalado, consulte el diagrama de cableado. El funcionamiento del freno a alta velocidad (60 Hz o superior) puede causar daños mecánicos o un desgaste anormal de las pastillas de freno; por lo tanto, asegúrese de utilizarlo a 60 Hz o menos.
Al accionar continuamente motor estándar japonés con un inversor
Capacidad compatible: motor estándar japonés de 0,75 kW a 5,5 kW
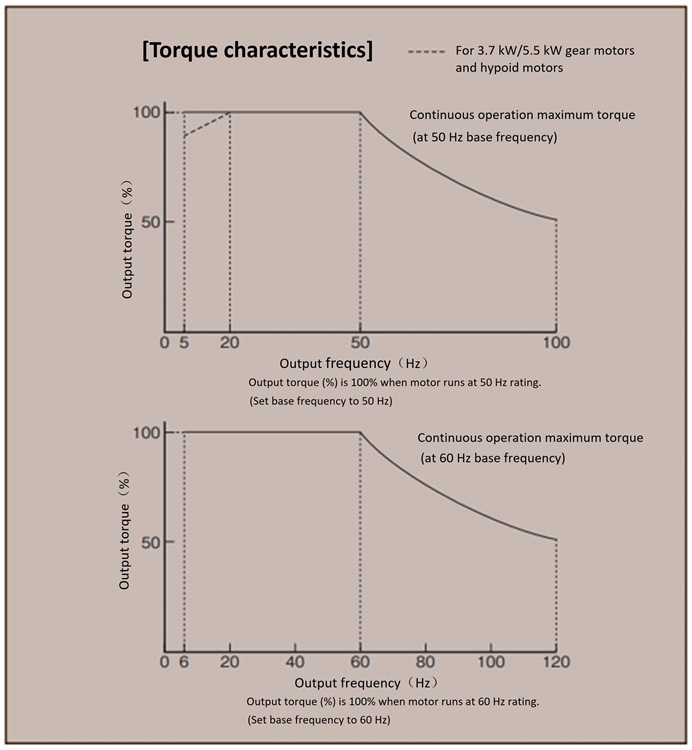
1. Características de par
Consulte el diagrama de la derecha para conocer las características de frecuencia y par.
- A altas velocidades, el par disminuye en proporción inversa a la velocidad de rotación debido a que la potencia (kW) permanece constante. Además, a medida que aumenta la velocidad de rotación, también aumentan el ruido del motor, el ruido del ventilador, el ruido del reductor, las vibraciones, etc.
- - A bajas velocidades, la eficiencia operativa y el efecto de refrigeración del motor disminuyen, lo que provoca un gran aumento de temperatura.
2. Con freno
- El freno requiere una fuente de alimentación específica (frecuencia, voltaje), por lo que su circuito debe funcionar por separado. Los productos estándar se envían con los cables del freno atornillados a los del motor, pero retire los tornillos y conéctelos aparte.
- -Al frenar, hazlo a 60 Hz (1800 r/min) o menos.
Frenar a altas velocidades de 60 Hz o más puede causar daños mecánicos, desgaste anormal y generación de calor en el revestimiento y otros problemas, así que asegúrese de operar a 60 Hz o menos.
3. Precauciones
- - A 60 a 120 Hz con una base de 60 Hz, y a 50 a 100 Hz con una base de 50 Hz, el rango característico es de potencia constante, al igual que un motor estándar, y el par de salida es limitado, por lo que se debe tener cuidado con el par de carga.
- - Al configurar el voltaje de entrada del inversor al motor, configure la frecuencia base y el voltaje base del inversor, y asegúrese de configurar el voltaje de salida del inversor para que coincida con el voltaje y la frecuencia indicados en la placa de características.
- Si se requiere el 100 % del par a baja frecuencia, utilice un variador de frecuencia para aplicar un aumento de par según sea necesario. Evite periodos prolongados de funcionamiento continuo con un aumento de par excesivo, ya que esto puede provocar sobrecalentamiento.
- El motor puede entrar en resonancia dependiendo de la velocidad y la frecuencia de rotación. Para un funcionamiento continuo, ajuste la frecuencia portadora del inversor para evitar la resonancia.
- Cuando la carga es ligera, como durante una prueba, el valor de la corriente puede ser elevado a bajas frecuencias. Esto se debe a las características del motor y no es anormal. El valor de la corriente se puede reducir modificando la configuración del inversor (reduciendo el aumento de par, disminuyendo la relación V/F o el control vectorial de par).
- - Para proteger el motor del sobrecalentamiento, instale un relé térmico electrónico o similar entre el inversor y el motor.
- Cuando un motor de 400 V es accionado por un inversor, puede producirse una falla en el aislamiento debido a las sobretensiones (microsobretensiones) generadas por la conmutación del inversor. Por lo tanto, se requieren medidas preventivas (contramedidas contra microsobretensiones) en el motor, y los motores estándar de 400 V incorporan dichas medidas, incluso si no se indica lo contrario. Sin embargo, si el nivel supera los 1250 V, instale un filtro o reactor de supresión en el lado del inversor.
- - El aumento de temperatura, el ruido y las vibraciones serán mayores que cuando se utiliza energía comercial.
