datos técnicos actuador lineal Selección Linipower Jack
Requisitos
Maquinaria utilizada: Elevador de mesa, dispositivo de elevación de escenario, dispositivo de conmutación de línea de transporte, etc.
Disposición... Patrón de enclavamiento (4 unidades, 6 unidades, etc.), accionamiento, acoplamiento, etc.
Carga máxima (W)..... Masa de la carga o pieza de trabajo N{kgf}
Velocidad del eje del tornillo (V)..... Velocidad requerida del gato (m/min)
Carrera: Carrera real utilizada (mm)
Tipo de tornillo: Tipo de tornillo de bolas (JWB), Tipo de tornillo de bolas de alto paso (JWH), tipo de tornillo trapezoidal (JWM)
Tipo de montaje: Tipo básico (para elevación o suspensión, con o sin dispositivo antirrotación), tipo tuerca móvil (para elevación o suspensión).
Condiciones de instalación: Base fija, horquilla en el extremo del eje, etc. - Consideraciones sobre el pandeo al aplicar una carga de compresión.
Vida útil prevista..... Vida útil del gato hidráulico (solo JWB, JWH)
Procedimiento de selección
1. Cálculo de la carga de corrección Ws
Considerando la naturaleza de la carga, calcule la carga corregida Ws consultando Factor de servicio (Tabla 1).
Carga corregida Ws (N{kgf}) = Carga máxima W (N{kgf}) × Factor de servicio Sf
Tabla 1. Factor de servicio Sf
| Cargar la naturaleza | Ejemplo de uso | Factor de servicio |
|---|---|---|
| Funcionamiento suave y sin vibraciones. pequeña inercia de carga |
Apertura y cierre de la válvula dispositivo de conmutación de la cinta transportadora |
1.0~1.3 |
| Funcionamiento con impacto leve medio de inercia de carga |
Diversos dispositivos móviles Varios elevadores |
1.3~1.5 |
| Funcionamiento con grandes impactos y vibraciones Gran inercia de carga |
Transporte de objetos mediante carro, posicionamiento y mantenimiento de rodillos giratorios | 1.5~3.0 |
Nota: Los Factor de servicio anteriores son pautas generales y deben determinarse teniendo en cuenta las condiciones de uso.
2. Cálculo de la carga W por gato
La carga W por gato se calcula a partir de la carga Ws corregida. En el caso de funcionamiento encadenado, consulte factor múltiple (Tabla 2) para el cálculo.
Carga por gato W (N{kgf}) = Carga corregida Ws (N{kgf}) / Número de gatos utilizados × factor múltiple fd
Tabla 2. factor múltiple fd
| Número de unidades enlazadas (unidades) | 2 | 3 | 4 | 5~8 |
|---|---|---|---|---|
| factor múltiple | 0.95 | 0.9 | 0.85 | 0.8 |
3. Seleccione provisionalmente el número de modelo del Linipower Jack
Consulte la sección "Puntos a considerar al seleccionar provisionalmente" para seleccionar provisionalmente el número de modelo del gato.
Puntos a considerar al seleccionar provisionalmente un producto
- 1. La relación de velocidad del tornillo sin fin se selecciona provisionalmente en función de la velocidad del eje del tornillo. Si resulta difícil determinarla, considere la relación de velocidad H.
- 2. Seleccione el trazo teniendo en cuenta un margen de seguridad.
- 3. Seleccione las opciones según sea necesario.
4. Comprobación de la torsión y la velocidad de rotación del eje del tornillo.
- 1. Consideración de la carga de pandeo admisible
Si se aplica una carga de compresión, asegúrese de que sea inferior a la carga de pandeo admisible. Aquí referencia)
Si se excede el valor permitido, aumente el tamaño del gato y vuelva a calcular. - 2. Velocidad de rotación admisible del eje del tornillo
En el caso de una especificación de tuerca móvil, verifique que la velocidad de rotación del eje del tornillo sea inferior a la velocidad permitida. Aquí referencia)
Si se excede el valor permitido, aumente el tamaño del gato y vuelva a calcular.
5. Compruebe la velocidad de rotación de entrada requerida.
La velocidad de rotación de entrada requerida del gato se calcula a partir de la velocidad requerida del eje del tornillo.
N = V ℓ ×R
N: Velocidad de rotación de entrada r/min
V: Velocidad del eje del tornillo (m/min)
ℓ: Tornillo de plomo m
R: Relación de velocidad del tornillo sin fin
6. Compruebe el par de entrada requerido
Calcule el par de entrada requerido.
T = W×ℓ 2×π×R×η + To
T: Par de entrada requerido N·m{kgf·m}
W: Carga de elevación N{kgf}
ℓ: Tornillo de plomo m
π: Pi 3.14
R: Relación de velocidad del tornillo sin fin
η: Eficiencia general del gato
Para: Par de ralentí sin carga N·m{kgf·m}
- Nota)
Consulte especificaciones principales de cada producto para obtener información sobre el paso del tornillo, la relación de velocidad del sinfín, la eficiencia general y el par de ralentí sin carga.
Preste atención a las unidades de paso de rosca. Ejemplo: 8 mm → 0,008 m
7. Compruebe la capacidad de entrada requerida
Unidades SI P = T×N 9550
Unidad de gravedad P = T×N 974
T: Par de entrada requerido N·m{kgf·m}
P: Capacidad de entrada requerida (kW)
N: Velocidad de rotación de entrada r/min
8. Consideración de la carga admisible en voladizo
Al instalar un piñón, engranaje, correa, etc. en el eje de entrada, verifique que esté por debajo de la carga de voladizo permitida (ver aquí).
Si excede el valor permitido, aumente el tamaño del gato y vuelva a calcular.
9. Comprobación de la vida útil (solo tipos JWB y JWH)
Compruebe si se cumple la vida útil prevista (véase aquí).
Si desea aumentar el distancia de recorrido esperado, aumente el tamaño del gato y vuelva a calcular.
*No se pueden realizar cálculos de vida útil para los tipos JWM (tornillo trapezoidal).
10. Decidir sobre las opciones
Seleccione la opción que mejor se ajuste a sus condiciones de uso.
- ・Opciones de salida ・Opciones de montaje
- ・Opciones de control ・Opciones de entrada
- ・Opciones incluidas
(Consulte Biblioteca de planos para cada producto)
11. Decidir el número de modelo del cuerpo del gato
Se determinará el número de modelo oficial del cuerpo Linipower Jack.
Selección de dispositivos periféricos
Selección de motor
Calcule la capacidad requerida Pt de la fuente de accionamiento para el enclavamiento y seleccione la fuente de accionamiento.
1. Cálculo del par total requerido Tt de la fuente de accionamiento
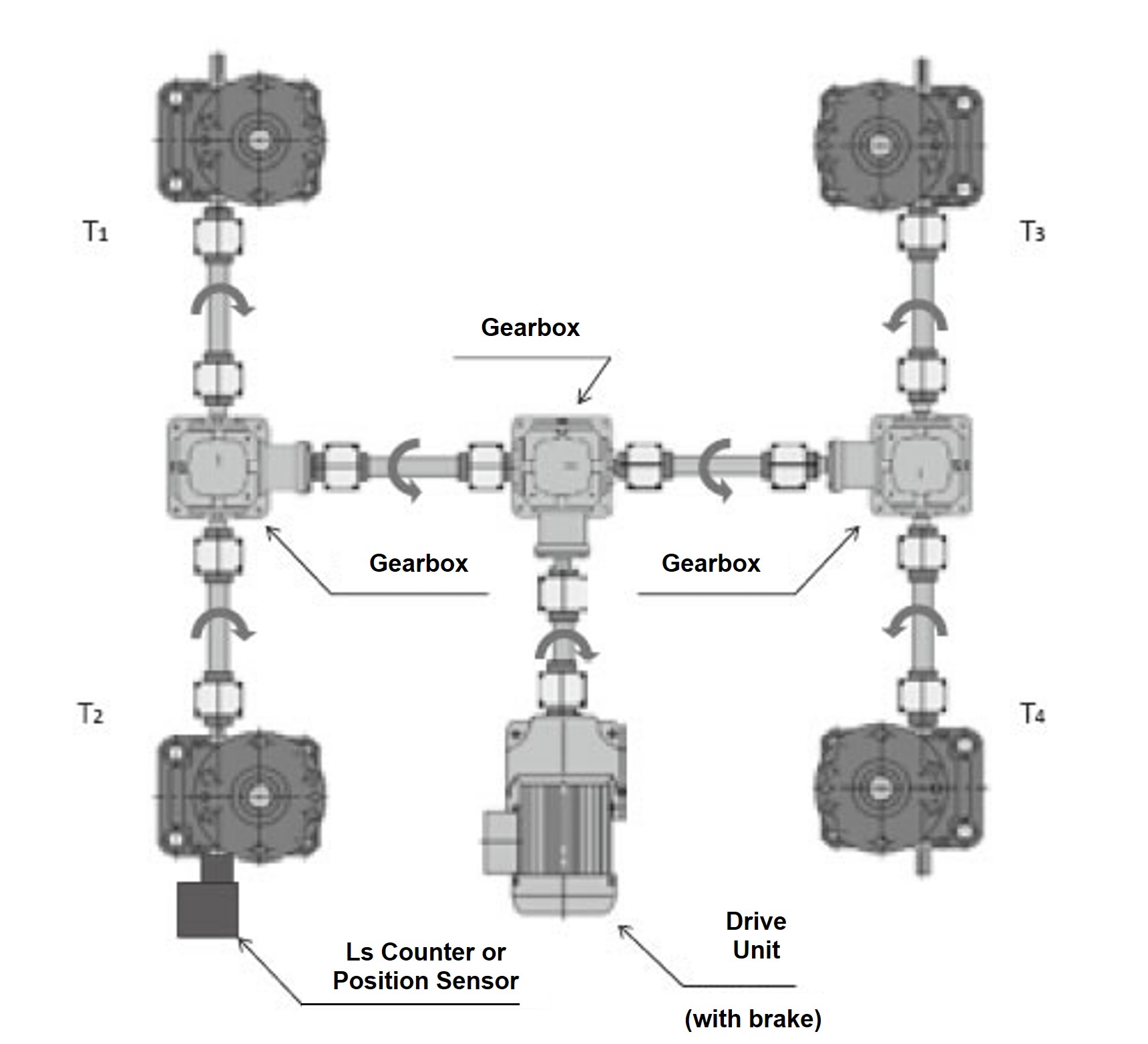
Calcule el par requerido T1 a T4 en el lado de la fuente de accionamiento para cada gato y súmelos para calcular el par total requerido Tt para la fuente de accionamiento.
[Par de apriete requerido por gato]
T 1 a 4 = T (eficiencia de la caja de cambios) Número de cajas de cambios
[Par total requerido de la fuente de accionamiento]
Tt = T1 + T2 + T3 + T4
T 1 a 4: Par requerido en el lado de la fuente de accionamiento de cada gato N·m{kgf·m}
T: Par de entrada requerido del cuerpo del gato N·m{kgf·m}
Eficiencia de la caja de cambios: Generalmente se toma como 0,9.
Tt: Par total requerido de la fuente de accionamiento N·m{kgf·m}
Cuando se conectan cuatro unidades (Figura 1), T 1 a 4 = T0.9 2.
Figura 1
2. Compruebe el par de torsión admisible del eje de entrada.
Compruebe que el par de entrada requerido del gato sea igual o inferior al par de entrada admisible del gato seleccionado.
ejemplo)
Cuando los gatos están dispuestos en línea recta como se muestra en la Figura 2, el par de entrada requerido de dos gatos se transmite al eje de entrada del gato en el lado de accionamiento.
Compruebe que el par de torsión de estas dos unidades sea inferior al par de torsión admisible del eje de entrada.
Figura 2
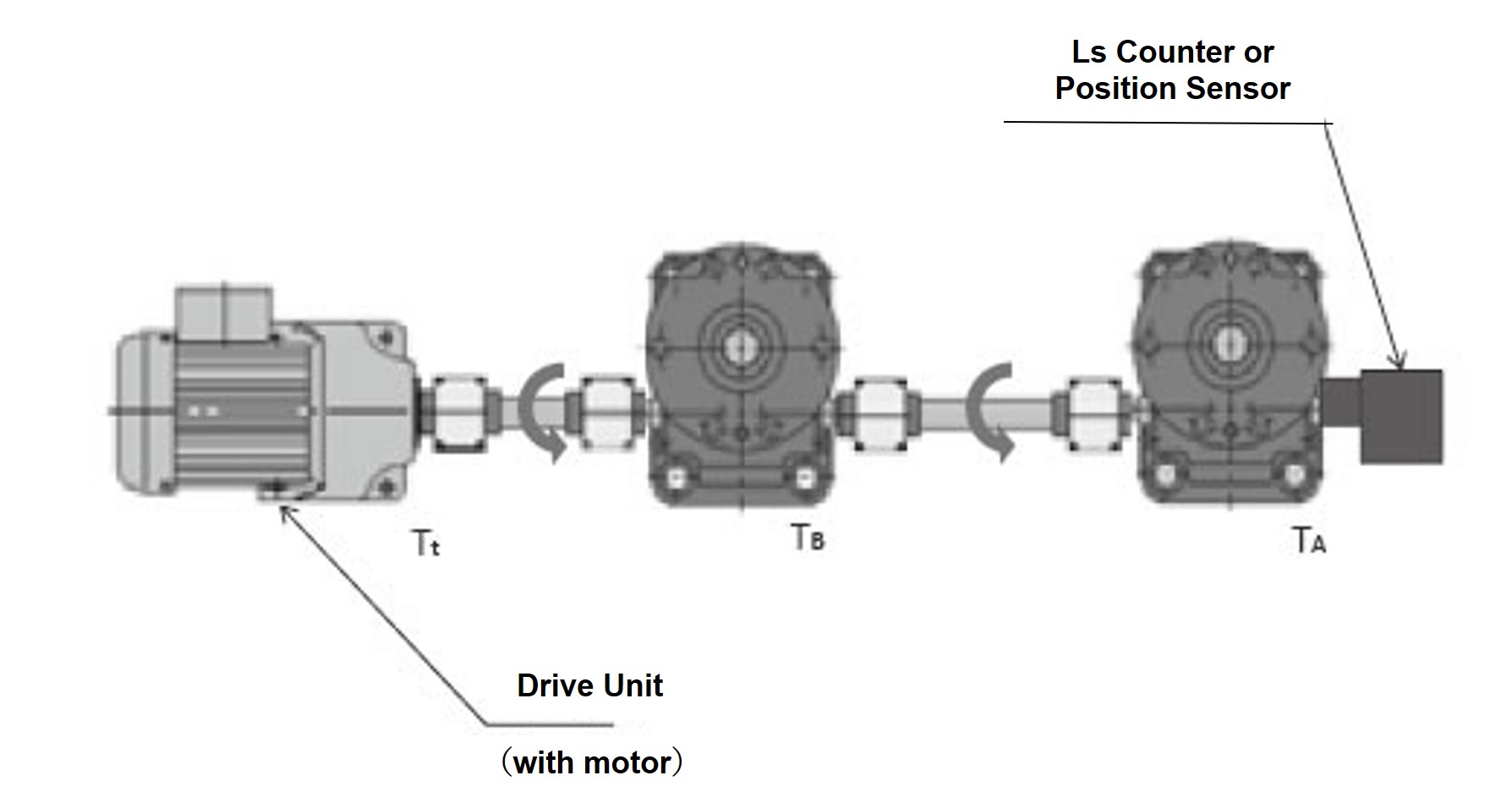
Par de apriete requerido solo para el gato A: T A
Par de apriete requerido solo para el gato B: T B
Par requerido de la fuente de accionamiento T t = T A + T B < Par admisible del eje de entrada
3. Cálculo de la capacidad de la fuente de alimentación requerida Pt
La capacidad de accionamiento requerida Pt se calcula a partir de la velocidad de rotación de entrada N y el par total requerido Tt calculado en 1.
Unidades SI Pt = Tt × N 9550
Unidad de gravedad Pt = Tt×N 974
Punto: Potencia de accionamiento requerida (kW)
Tt: Par total requerido de la fuente de accionamiento N·m{kgf·m}
N: Velocidad de rotación de entrada del conector r/min
Selección de otros equipos
Caja de cambios
Seleccionar en función de la velocidad de rotación de entrada y el par admisible.
Consulte el catálogo independiente para Caja de cambios de inglete Tsubaki.
Acoplamiento
Seleccionar en función del par admisible y del diámetro máximo del eje.
Consulte el catálogo de acoplamientos Tsubaki.
Ejemplo de selección de Linipower Jack
ejemplo:
Elevador articulado de 4 unidades (la disposición es la misma que la del diagrama inferior). La temperatura de fábrica es normal; hay algo de polvo.
La guía está instalada en el lado del elevador para evitar cargas laterales, y la base está fija; el extremo del eje está soportado/fijo. La alimentación es trifásica de 220 V/60 Hz.
Frecuencia de uso: 2 veces/hora x 8 horas/día x 300 días/año x 3 años de uso
- (1) Carga máxima: 98,0 kN{10tf}/4 unidades
- (2) Velocidad requerida: 5 mm/s (0,3 m/min)
- (3) Carrera: 260 mm
patrón enlazado de 4 unidades
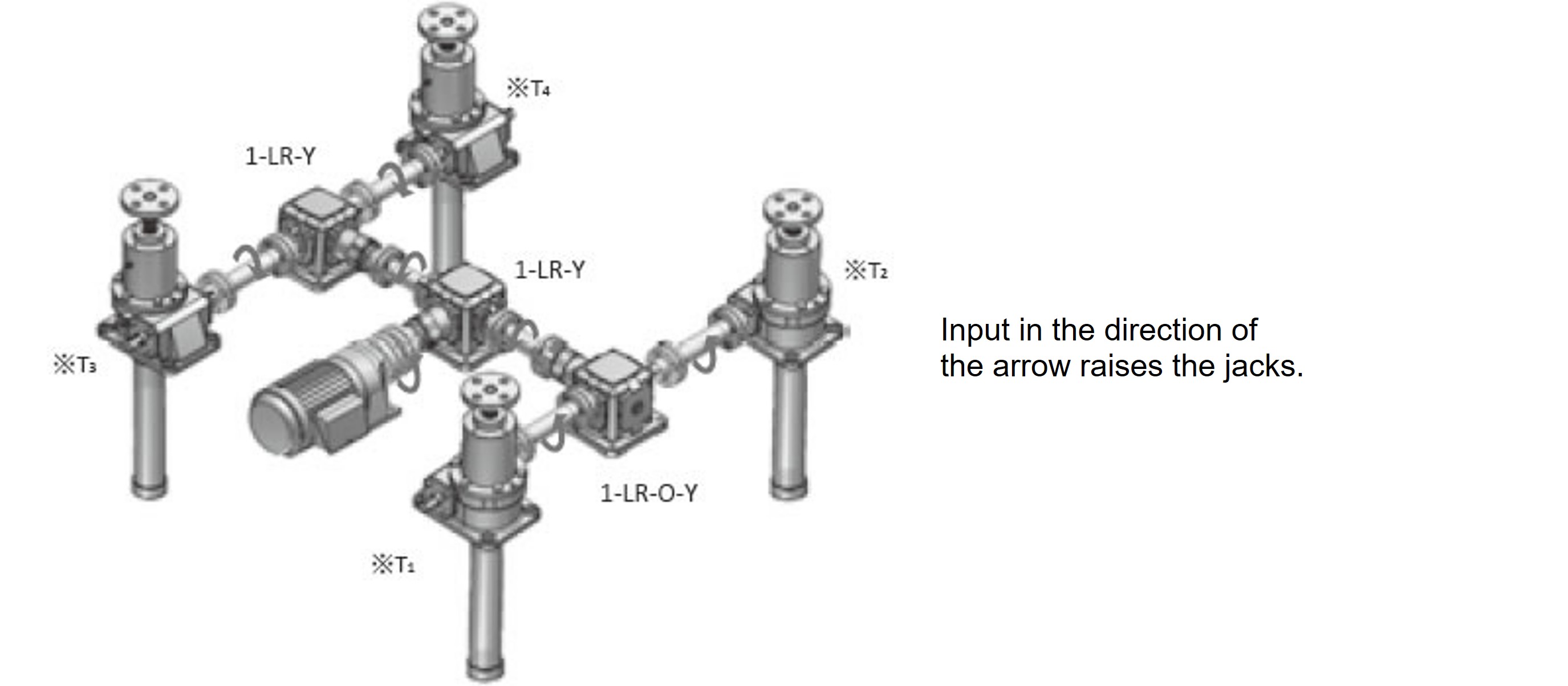
*Véase arriba para T1 a T4
| Unidades del SI |
|---|
|
| {unidad de gravedad} |
|---|
|
Ejemplo de selección de dispositivos periféricos
A. Determinación de la fuente de impulso
1. Par de apriete requerido T1 (2.3.4) en el lado de accionamiento de cada gato
La trayectoria de dispersión es la misma para los cuatro gatos hidráulicos.
Unidades SI Tt = T 1 × 4 = 83,5 N m
Unidad de gravedad Tt = T 1 ×4 = 8,52 kgf·m
2. Consideración del par máximo admisible del eje de entrada del gato
En este patrón enlazado, no hay más de dos jacks alineados en serie, por lo que no es necesario considerar esto.
3. Capacidad de accionamiento requerida Pt
Además, la velocidad de entrada es de 180 r/min.
1800 180 = 10En base a lo anterior, seleccionamos el Motorreductor Tsubaki GMTR221-42L10B de 2,2 kW con freno.
Para obtener más detalles, consulte el catálogo de motores con engranajes pequeños de Tsubaki.
B.1. La caja de cambios tiene una velocidad de entrada de 180 r/min.
El par de entrada requerido para el gato es 15,4 N・m {1,57 kgf・m}
1-1. Las cajas de engranajes en los lados izquierdo y derecho del gato tienen el par de torsión de dos gatos.
20,9 × 2 ×
0,9
= 46,4 N·m
2,13 × 2
× 0,9
= 5,11 kgf·m
Seleccionamos la caja de cambios ED4M, que cumple con los requisitos mencionados anteriormente.
(Sin embargo, tenga cuidado con el sentido de giro de la caja de cambios).
1-2. La caja de cambios del lado motorreductor es para cuatro gatos, por lo que el par
20,9 × 4
0.92
= 103 N·m
2,13 × 4
0.92
= 8,69 kgf·m
Se selecciona la caja de cambios ED6M que cumple con este requisito.
caja de cambios lateral del gato
- Lado izquierdo: ED4M 1-LR-OY
- Lado derecho: ED4M 1-LR-Y
Caja de cambios lateral Motorreductor
- ED6M 1-LR-Y
(Para obtener más detalles, consulte el catálogo Caja de cambios de inglete de Tsubaki)
B.2. Seleccione los acoplamientos adecuados según las condiciones del equipo.
(Para más detalles, consulte el catálogo de acoplamientos Tsubaki)
El método de consideración es
2-1 Para la conexión del gato a la caja de cambios, seleccione el par de entrada del gato requerido de 16,9 N・m {1,73 kg・fm}, el diámetro del eje de entrada del gato (Φ20 para JWB050USH) y el diámetro del eje de la caja de cambios (Φ19 para ED4M).
El número requerido es 2 x 2 x 2 = 8 piezas.
Entre las cajas de cambios 2-2, el par motor es equivalente al de dos gatos.
20.9×2 0.9 = 50.1N・m 2.13×2 0.9 = 5.11kgf・mSeleccione también el diámetro del eje de la caja de cambios del lado del gato (Φ19 para ED4M) y el diámetro del eje de la caja de cambios del lado Motorreductor (Φ25 para ED6M).
El número requerido es 2 x 2 = 4.
Entre la caja de cambios 2-3 y Motorreductor, el par es equivalente al de cuatro gatos.
20.9×4 0.92 = 85.2N・m 2.13×4 0.92 = 8.69kgf・mSeleccione también el diámetro del eje de la caja de cambios (Φ25 para ED6M) y el diámetro del eje de salida Motorreductor (Φ42 para GMTR221-42L10B). Se requieren dos unidades.
