datos técnicos Reductor Selección motor CC sin escobillas
Si desea consultar los procedimientos de selección y los puntos importantes, continúe a continuación.
Si desea acotar o seleccionar provisionalmente una serie de productos,
Por favor, haga clic aquí.
Si ya se han definido sus condiciones de uso y desea una selección detallada,
Por favor, haga clic aquí.
Selección
Podemos seleccionar la capacidad del motor en función del ciclo operativo, el par de carga, etc.
Al realizar una consulta, utilice la hoja de solicitud de selección.
1. Condiciones
(1) Ciclo de conducción
Velocidad de rotación del eje de salida
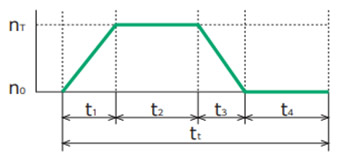
- n T: Velocidad máxima de rotación del eje de salida (r/min)
- t 1: Tiempo de aceleración (seg)
- t2: Tiempo en estado estacionario (seg)
- t 3: Tiempo de desaceleración (seg)
- t 4: Tiempo de parada (seg)
- t t:Tiempo para un ciclo (seg.)
Par de salida
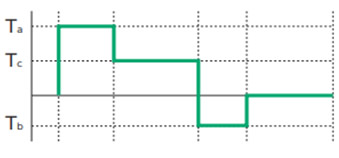
- T a: Par de aceleración (N・m)
- Tc: Par motor en estado estacionario (N·m)
- T b: Par de desaceleración (N・m)
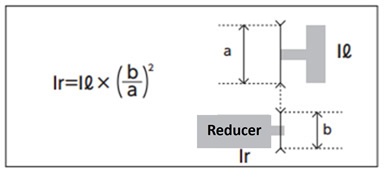
(2) Momento de inercia de la carga Ir
Calcule el momento de inercia de carga Ir en el eje de salida del reductor a partir de la tabla sobre cómo calcular el momento de inercia.
Ir: Momento de inercia de la carga en el eje de salida del reductor (kg·m 2)
(3) Par de aceleración/desaceleración T a, T b
Par de aceleración T a = △T a + T c
Par de desaceleración
△Ta = 2πIr × △na 60 × t1
Tb = △Tb - Tc
△Tb = 2πIr × △nb 60 × t3
- I r: Momento de inercia de la carga en el eje de salida del reductor (kg·m 2)
{I r + (I g + I m) × i 2}
(Inercia de la unidad reductora convertida del eje del motor + inercia del motor) x relación de velocidad^2 (datos del momento de inercia) - △T a: Par de aceleración inercial (N・m)
- △n a: Diferencia de velocidad de rotación (r/min) △n a = n T- n o
- △T b: Par de desaceleración inercial (N・m)
- △n b: Diferencia de velocidad de rotación (r/min) △n b = n T-no
(4) Par de torsión en estado estacionario T c
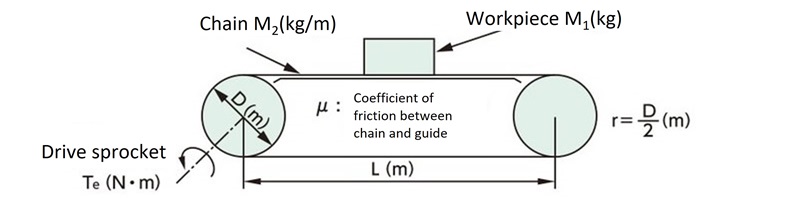 |
Tc = G(M1 + 2.1 × M2 × L) × μ × r G = aceleración gravitacional: 9,80665 m/s 2 |
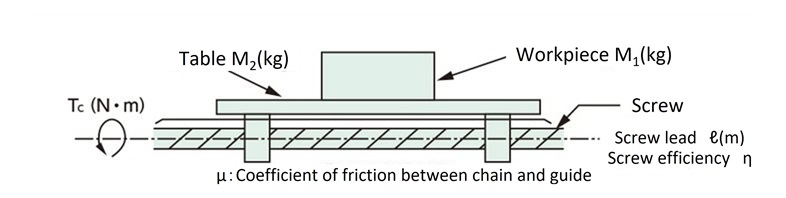 |
Tc = G(M1 + M2) × μ × ℓ 2 × π × η |
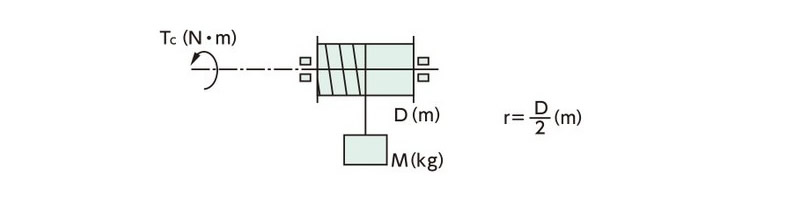 |
Tc = GM × r |
2. Procedimiento de selección
| (1) Calcula la relación de reducción i |
i ≒
Nm
nT
Nm: Velocidad de rotación del motor |
||||||||
| ↓ | |||||||||
| (2) Calcule el par de salida promedio |

|
||||||||
| ↓ | |||||||||
| (3) Decidir el tamaño Par promedio par máximo |
f s: Coeficiente de la serie Par máximo < Par máximo del eje de salida del reductor |
||||||||
| ↓ | |||||||||
| (4) Calcule la velocidad media de rotación del eje de salida n ave. |

|
||||||||
| ↓ | |||||||||
| (5) Comprobar la velocidad de rotación n ave. × i < velocidad de rotación de entrada nominal del reductor n T × i < Velocidad máxima de rotación de entrada del reductor |
|
||||||||
| ↓ | |||||||||
| (6) Compruebe la carga radial en el eje de salida. | OHL < N: Carga radial admisible del reductor* O.H.L = 2000 × Ta × f × Lf D D: Diámetro primitivo de la rueda dentada, etc. (mm) |
||||||||
*Consulte la carga radial admisible en tabla de ratio de kW.
f: coeficiente OHL
| Cadena | Correa dentada | correa trapezoidal |
|---|---|---|
| 1.0 | 1.25 | 1.5 |
Lf: Factor de posición de acción
| ℓ/Q | 0.25 | 0.38 | 0.5 | 0.75 | 1 |
|---|---|---|---|---|---|
| Lf | 0.8 | 0.9 | 1 | 1.5 | 2 |
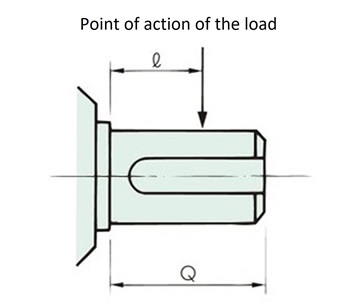
Longitud de referencia: Q
| Número de modelo | relación de velocidad | Q |
|---|---|---|
| DCHM020 | 10 ~ 60 | 36 |
| DCHM040 | 10 ~ 50 | 42 |
| DCHM075 | 10 ~ 50 | 58 |
Coeficiente de la serie: fs
| Número de modelo | Coeficientes de la serie |
|---|---|
| DCHM | 1.7 |
eje de salida hueco
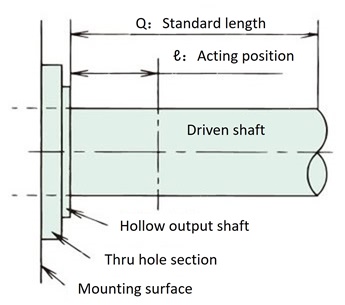
P: Consulte la tabla de la izquierda para conocer las longitudes de referencia.
Eje de salida sólido
P: Consulte la tabla de dimensiones para cada tipo para conocer la longitud de referencia.
3. Compruebe la carga en voladizo del eje de salida.
Al acoplar una rueda dentada, engranaje, correa, etc. al eje de salida central, o al acoplarla a un eje hueco mediante roscas de carcasa, asegúrese de que la carga en voladizo que actúa sobre el eje de salida sea inferior a la carga máxima admisible del motorreductor pequeño que se esté utilizando.
*Cuando se utilice una correa dentada de servicio pesado, agregue tensión de instalación al cálculo, independientemente del coeficiente OHL (f) en la Tabla 1.
[Cálculo de la carga en voladizo]
OHL admisible ≧ 2000 × TF × f × Lf Dp
- TF: Par de corrección
- f: Coeficiente OHL (Tabla 1)
- Lf: Posición del coeficiente de acción (Ecuación 1)
- Dp: Diámetro primitivo de la rueda dentada, etc. (mm)
Longitud de referencia: Q
| Número de modelo | relación de velocidad | Q |
|---|---|---|
| DCHM020 | 10 ~ 60 | 36 |
| DCHM040 | 10 ~ 50 | 42 |
| DCHM075 | 10 ~ 50 | 58 |
Tabla 1. Coeficiente OHL: f
| Cadena | Correa dentada | correa trapezoidal |
|---|---|---|
| 1.0 | 1.25 | 1.5 |
Ecuación 1. Posición del factor de acción: Lf
| ℓ/Q | 0.25 | 0.38 | 0.5 | 0.75 | 1 |
|---|---|---|---|---|---|
| Lf | 0.8 | 0.9 | 1 | 1.5 | 2 |
| Eje sólido | eje hueco |
|---|---|
|
P: Consulte la tabla de dimensiones para cada tipo para conocer la longitud de referencia. |
P: Consulte la tabla de la izquierda para conocer las longitudes de referencia. |
4. Momento de inercia convertido en eje del motor
| Número de modelo | Relación de reducción | momento de inercia x10-4 kg m 2 |
|---|---|---|
| DCHM020-20H | 10 | 0.065 |
| 15 | 0.050 | |
| 20 | 0.045 | |
| 25 | 0.041 | |
| 30 | 0.040 | |
| 40 | 0.039 | |
| 50 | 0.038 | |
| 60 | 0.037 | |
| DCHM040-30H | 10 | 0.117 |
| 15 | 0.076 | |
| 20 | 0.060 | |
| 25 | 0.051 | |
| 30 | 0.047 | |
| 40 | 0.056 | |
| 50 | 0.052 | |
| DCHM075-35H | 10 | 0.306 |
| 15 | 0.209 | |
| 20 | 0.170 | |
| 25 | 0.146 | |
| 30 | 0.140 | |
| 40 | 0.158 | |
| 50 | 0.145 |
| Número de modelo | Relación de reducción | momento de inercia x10-4 kg m 2 |
|---|---|---|
| DCHM020-22U | 10 | 0.068 |
| 15 | 0.051 | |
| 20 | 0.046 | |
| 25 | 0.041 | |
| 30 | 0.040 | |
| 40 | 0.039 | |
| 50 | 0.038 | |
| 60 | 0.037 | |
| DCHM040-28U | 10 | 0.133 |
| 15 | 0.083 | |
| 20 | 0.065 | |
| 25 | 0.054 | |
| 30 | 0.049 | |
| 40 | 0.059 | |
| 50 | 0.054 | |
| DCHM075-38U | 10 | 0.347 |
| 15 | 0.227 | |
| 20 | 0.180 | |
| 25 | 0.152 | |
| 30 | 0.145 | |
| 40 | 0.165 | |
| 50 | 0.149 |
Motor CC sin escobillas
| Capacidad del motor | freno | momento de inercia x10-4 kg m 2 |
|---|---|---|
| 0.2kW | Sin frenos | 1.154 |
| Con freno | 1.159 | |
| 0.4kW | Sin frenos | 1.753 |
| Con freno | 1.780 | |
| 0.75kW | Sin frenos | 12.761 |
| Con freno | 12.918 |
