datos técnicos del reductor de servomotor TERVO
Si desea consultar los procedimientos de selección y los puntos importantes, continúe a continuación.
Si desea acotar o seleccionar provisionalmente una serie de productos,
Por favor, haga clic aquí.
Si ya se han definido sus condiciones de uso y desea una selección detallada,
Por favor, haga clic aquí.
Selección
1. Condiciones
(1) Ciclo de conducción
Velocidad de rotación del eje de salida
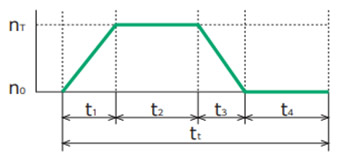
- n T: Velocidad máxima de rotación del eje de salida (r/min)
- t 1: Tiempo de aceleración (seg)
- t2: Tiempo en estado estacionario (seg)
- t 3: Tiempo de desaceleración (seg)
- t 4: Tiempo de parada (seg)
- t t:Tiempo para un ciclo (seg.)
Par de salida
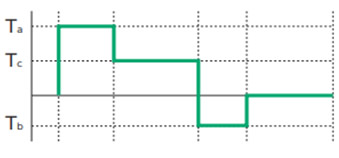
- T a: Par de aceleración (N・m)
- Tc: Par motor en estado estacionario (N·m)
- T b: Par de desaceleración (N・m)
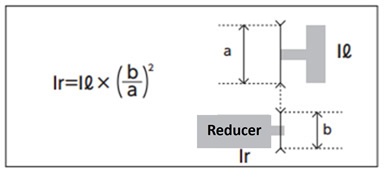
(2) Momento de inercia de la carga Ir
Calcule el momento de inercia de carga Ir en el eje de salida del reductor a partir de la tabla sobre cómo calcular el momento de inercia.
Ir: Momento de inercia de la carga en el eje de salida del reductor (kg·m 2)
(3) Par de aceleración/desaceleración T a, T b
Par de aceleración T a = △T a + T c
Par de desaceleración
△Ta = 2πIr × △na 60 × t1
Tb = △Tb - Tc
△Tb = 2πIr × △nb 60 × t3
- I r: Momento de inercia de la carga en el eje de salida del reductor (kg·m 2)
- △T a: Par de aceleración inercial (N・m)
- △n a: Diferencia de velocidad de rotación (r/min) △n a = n T- n o
- △T b: Par de desaceleración inercial (N・m)
- △n b: Diferencia de velocidad de rotación (r/min) △n b = n T-no
(4) Par de torsión en estado estacionario T c
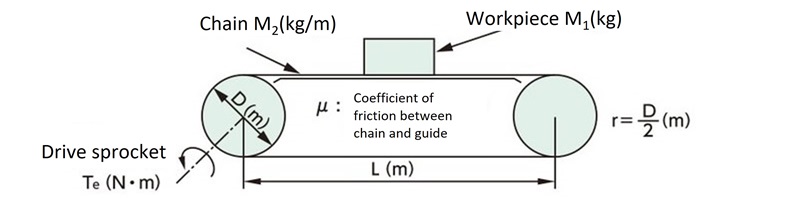 |
Tc = G(M1 + 2.1 × M2 × L) × μ × r G = aceleración gravitacional: 9.80665m/s2 |
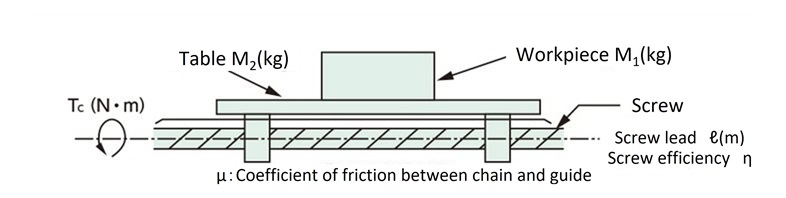 |
Tc = G(M1 + M2) × μ × ℓ 2 × π × η |
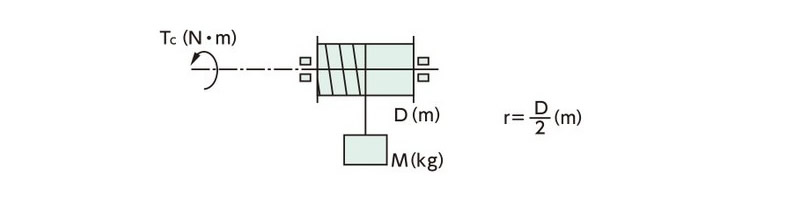 |
Tc = GM × r |
2. Procedimiento de selección
| (1) Calcula la relación de reducción i |
i ≒
Nm
nT
Nm: Velocidad de rotación del motor |
|||||||||||||||||
| ↓ | ||||||||||||||||||
| (2) Calcule el par de salida promedio |

|
|||||||||||||||||
| ↓ | ||||||||||||||||||
| (3) Decidir el tamaño Par promedio par máximo |
f s: Coeficiente de la serie GMTK・HMTK:1.4 EWJMK・EWMK・SWJMK・SWMK:1.0 |
|||||||||||||||||
| ↓ | ||||||||||||||||||
| (4) Calcule la velocidad media de rotación del eje de salida n ave. |

|
|||||||||||||||||
| ↓ | ||||||||||||||||||
| (5) Comprobar la velocidad de rotación n ave. × i < velocidad de rotación de entrada nominal del reductor n T × i < Velocidad máxima de rotación de entrada del reductor |
|
|||||||||||||||||
| ↓ | ||||||||||||||||||
| (6) Comprobar ciclo de trabajo porcentual (solo cabezal de engranaje helicoidal) ciclo de trabajo porcentual %ED = t 1 + t 2 + t 3 t t × 100 %ED < 50% y t 1 + t 2 + t 3 < 20 min. |
||||||||||||||||||
| ↓ | ||||||||||||||||||
| (7) Comprobar la carga radial del eje de salida | OHL < N: Carga radial admisible del reductor* O.H.L = 2000 × Ta × f × Lf D D: Diámetro primitivo de la rueda dentada, etc. (mm) |
|||||||||||||||||
*Consulte la carga radial admisible en tabla de ratio de kW.
f: coeficiente OHL
| Cadena | Correa dentada | correa trapezoidal |
|---|---|---|
| 1.0 | 1.25 | 1.5 |
Lf: Factor de posición de acción
| ℓ/Q | 0.25 | 0.38 | 0.5 | 0.75 | 1 |
|---|---|---|---|---|---|
| Lf | 0.8 | 0.9 | 1 | 1.5 | 2 |
eje de salida hueco
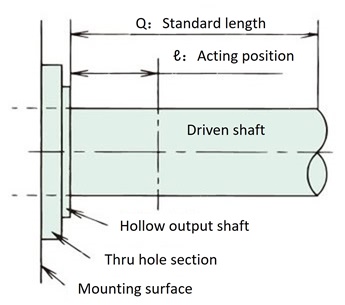
P: Consulte la tabla de la izquierda para conocer las longitudes de referencia.
Eje de salida sólido
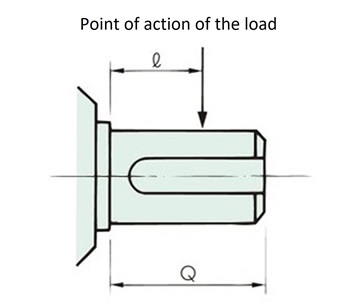
P: Consulte la tabla de dimensiones para cada tipo para conocer la longitud de referencia.
Longitud de referencia: Q Para eje de salida hueco
HMTK
| Número de modelo | relación de velocidad | Q |
|---|---|---|
| HMTK0220H | 5 ~ 60 | 36 |
| HMTK0230H | 80 ~ 200 | 42 |
| HMTK0430H | 5 ~ 50 | |
| HMTK0435H | 60 ~ 200 | 58 |
| HMTK0735H | 5 ~ 50 | |
| HMTK0745H | 60 ~ 200 | |
| HMTK1545H | 5 ~ 80 | 66 |
| HMTK2245H | 5 ~ 60 | |
| HMTK1555H | 100 ~ 200 | |
| HMTK2255H | 80 ~ 120 | 82 |
| HMTK3755H | 5 ~ 60 | |
| HMTK5555H | 5 ~ 60 |
SWJMK, SWMK
| Número de modelo | relación de velocidad | Q |
|---|---|---|
| SWJMK35 | 10 ~ 60 | 20 |
| SWJMK42 | 10 ~ 60 | 25 |
| SWJMK50 | 10 ~ 60 | 30 |
| SWJMK63 | 10 ~ 60 | 35 |
| SWJMK70 | 10 ~ 60 | 40 |
| SWMK80 | 10 ~ 60 | 50 |
| SWMK100 | 10 ~ 60 | 55 |
